R4D4
// Shajay Bhooshan Studio
Studio Master: Shajay Bhooshan
Consultant: Gregory Epps
// Students:
Alexandra K.G. Lipezker (Italy), Evangelia Magnisali (Greece), Georgios Pasisis (Greece), Sai Prateik Bhasgi (India)
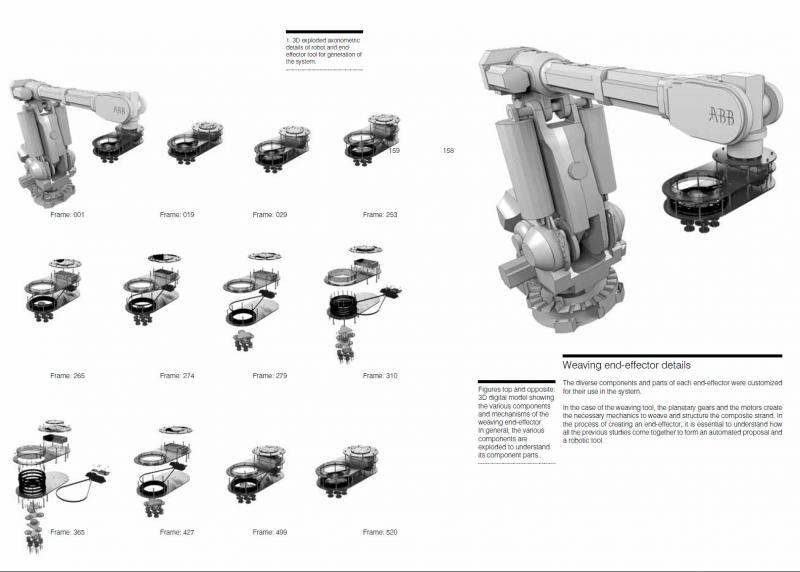
// Project description:
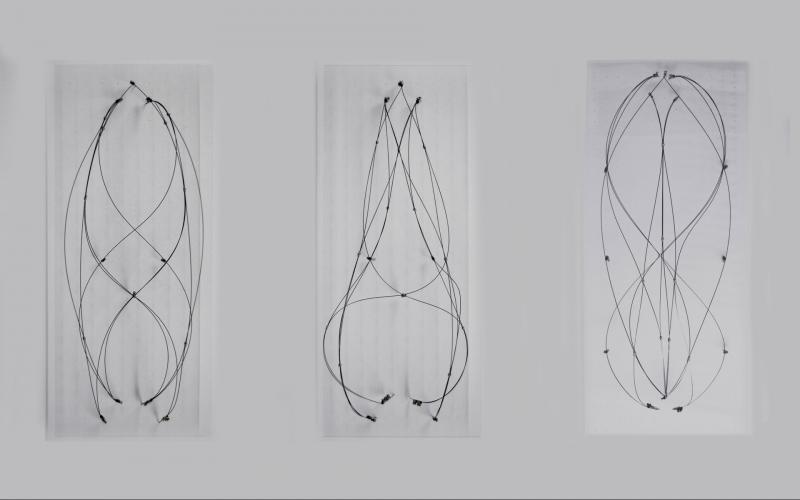
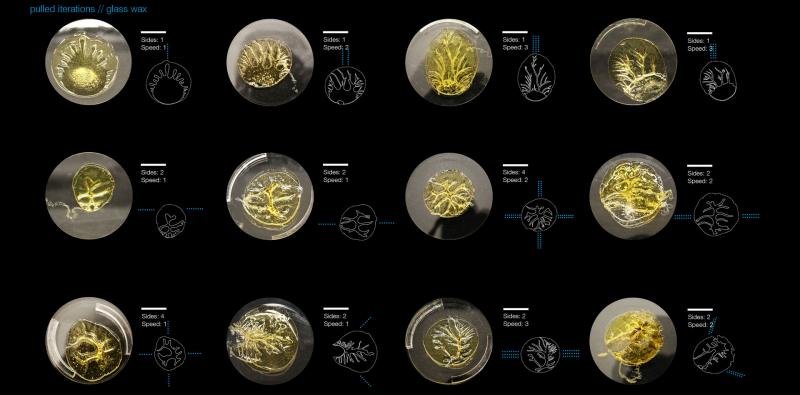
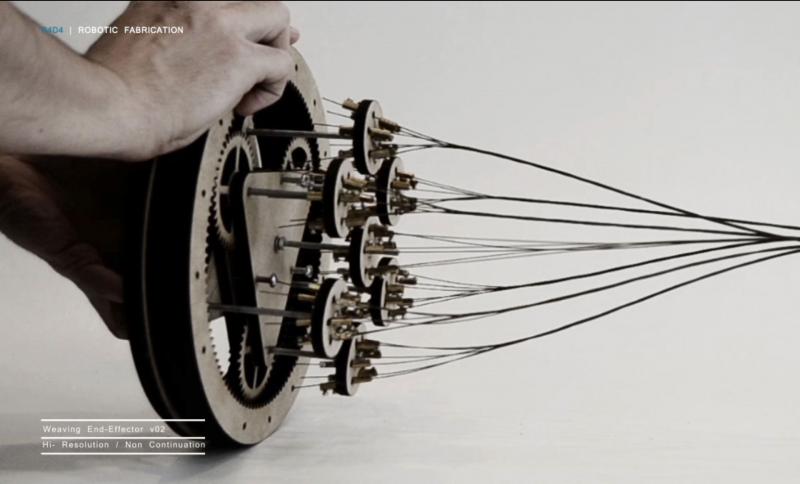
Investigations into materials and robotics in the field of architecture challenge architectural discourse by proposing alternatives to conventional modes of practice through the adoption of new fabrication technologies. The aim of our research is to create a process that ensures continuity between the design and the materialisation of the final outcome, through the customisation of industrial robotic arm technology. In order to achieve the development of a prototypical system, we have created a composite material that combines fibre- glass rods, spring steel and nylon coating. In taking advantage of the force and form interaction that characterises active bending structures, our networked material system is deformed through a thermoforming process. From this the overall output is fused to produce an architecture of a high resolution.
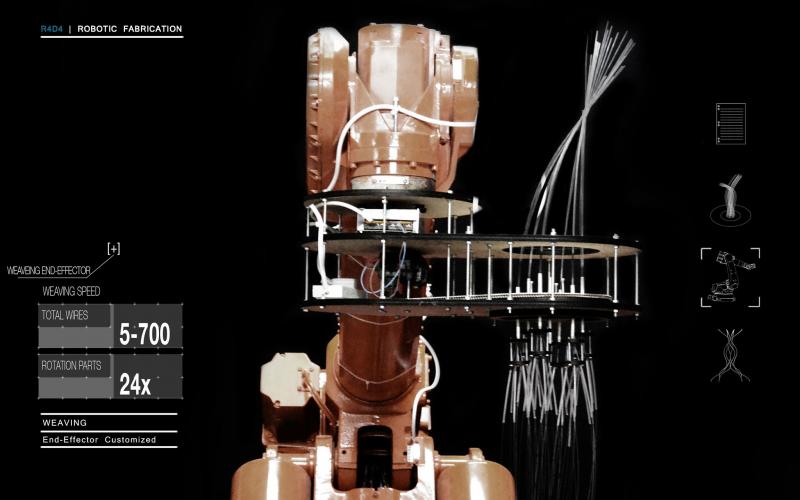
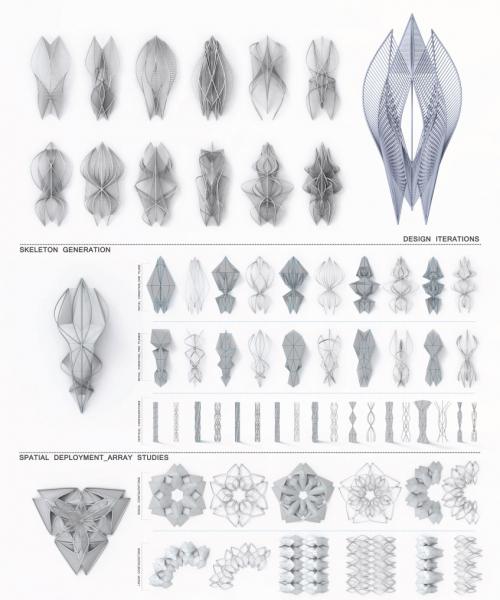
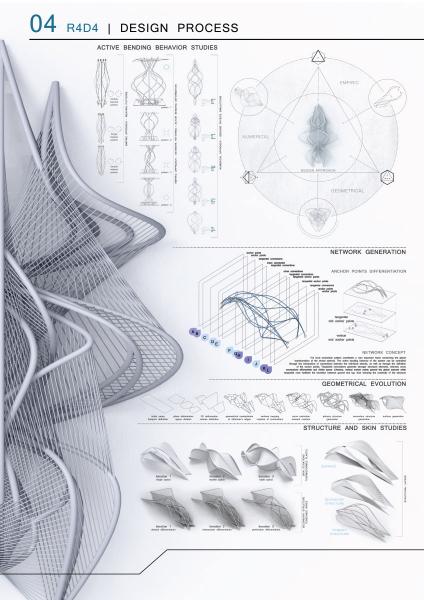
The non-linearity of the formation process of active-bending structures, such as those generated with our material system, has led us to the development of force and materially-informed structural concepts, as well as to customised form-finding techniques. More specifically, the material, initially weaved in linear strands in a planar configuration, becomes networked into a global structural system. Robotic arms elastically deform this system in order to achieve a spatial form. The geometric and structural behaviour of the networks are a direct result of the material properties, initial topology setup and robotic choreography.
With the understanding that the introduction of new tools in architecture alters the way we perceive and drive manufacturing processes, our research aims to formulate a new fabrication method that generates and addresses new formal and tectonic challenges. We propose a way to develop a process of actively bending architectural forms by integrating robotic arm technology into the construction process with the aim to apply the system to large-scale architectures.