SCL
// Robert Stuart-Smith Studio
Studio Master: Robert Stuart-Smith
Assistant: Tyson Hosmer
Consultant: Manos Matsis
// Students:
Duo Chen (China), Liu Xiao (China), Sasila.Krishnasreni (Thailand), Yiqiang Chen (China)
// Project description:
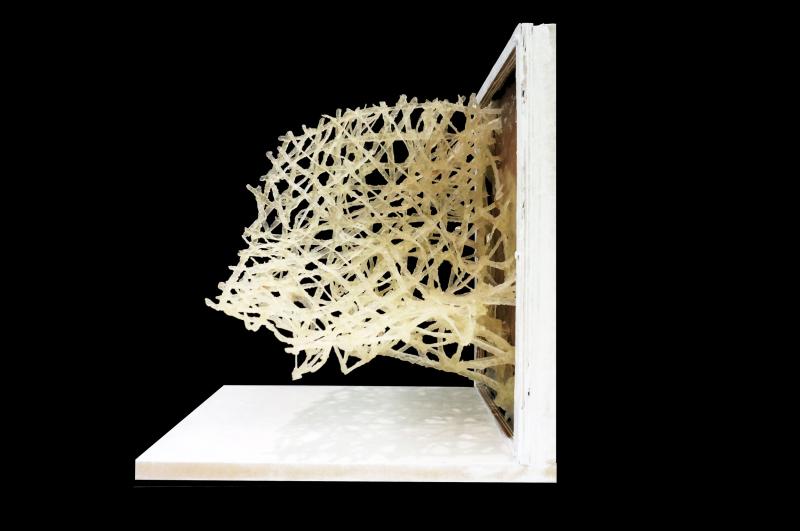
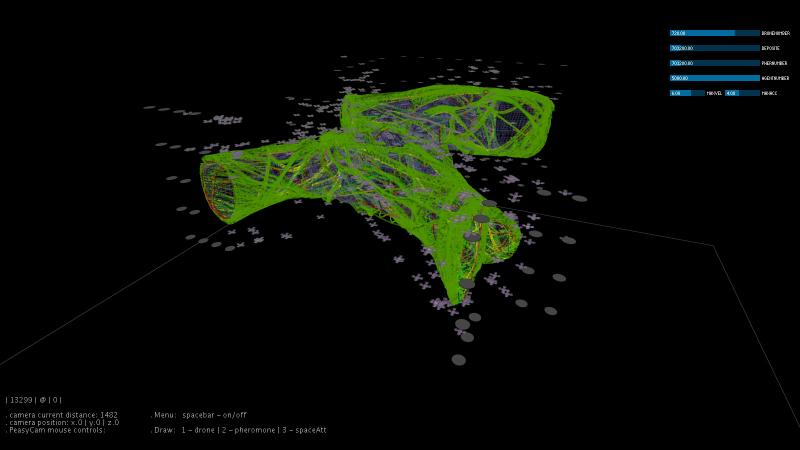
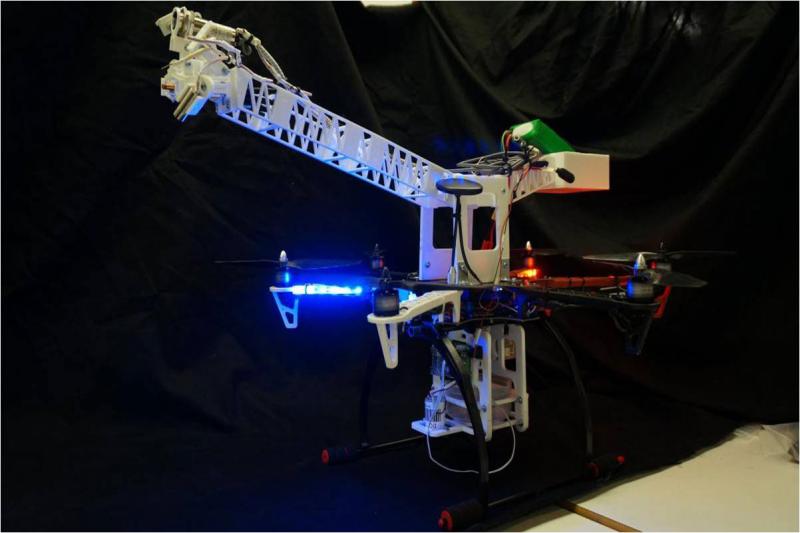
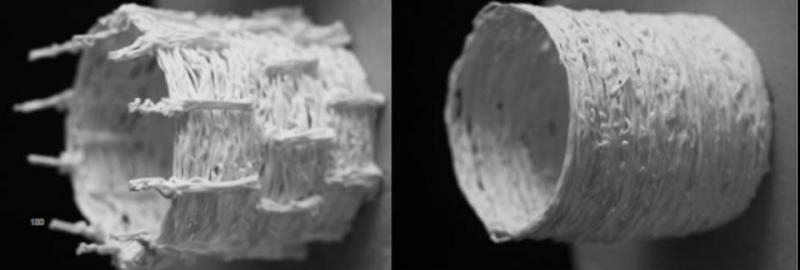
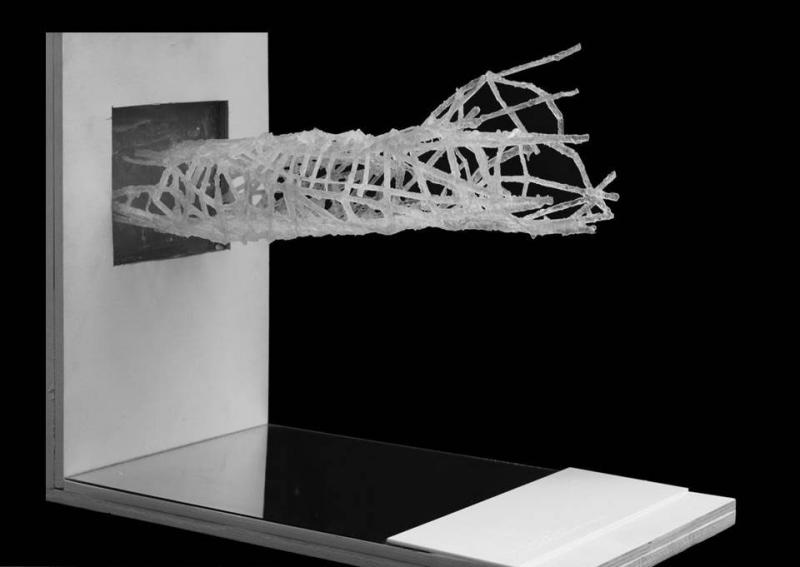
SCL’s research proposes a non-standard construction process created by a swarm of UAVs. This process merges design and production within a singular process, based on the behaviours of robotic systems and composite materials. In contrast to conventional construction techniques, our system harnesses drone technologies in order to propose a construction process that can be pre-designed yet allow for flexibility in order to be implementable within a variety of environments through real-time structural feedback.
The construction of networked, lightweight cantilever and bridging structures in hard to access locations is made possible. Such structures arise from the printing sequences of the swarming UAVs and their responses to real-time structural analysis. This construction process alleviates the need for scaffolding in what is often a complex and awkward site-specific location whilst producing designs that are structurally and therefore materially efficient. In responding to the intricacies of complex site conditions spaces difficult to construct within such as the high spaces between buildings, mountains and cliffs become territories for further architectural development. The research argues for a time-based system adaptive process that is flexible in material organisation, form, structure, scale and configuration that is capable of responding to fluctuations in local environments and weather, structural and material behaviour and other unpredictable site-constraints.
The research has been explored within a design project situated at a difficult to access space between natural cliff faces allows for the testing of uav-printed material network to explore new connective bridging possibilities. The drone printing sequence is systematic, utilising real-time feedback information to inform the production of spatial structures that must operate first as cantilevers and finally as bridging structures. These structural typological changes are addressed through real-time responsive construction behaviours from the UAVs that places the role of design within construction as well as in a project’s outcome.