VOID
// Robert Stuart-Smith Studio
Studio Master: Robert Stuart-Smith
Assistant: Tyson Hosmer
Consultant: Manos Matsis
// Students:
Alejandra Maria Rojas (Peru), Maria Garcia Mozota (Spain), Karthikeyan Arunachalam (India), Melhem Sfeir (Lebanon)
// Project description:
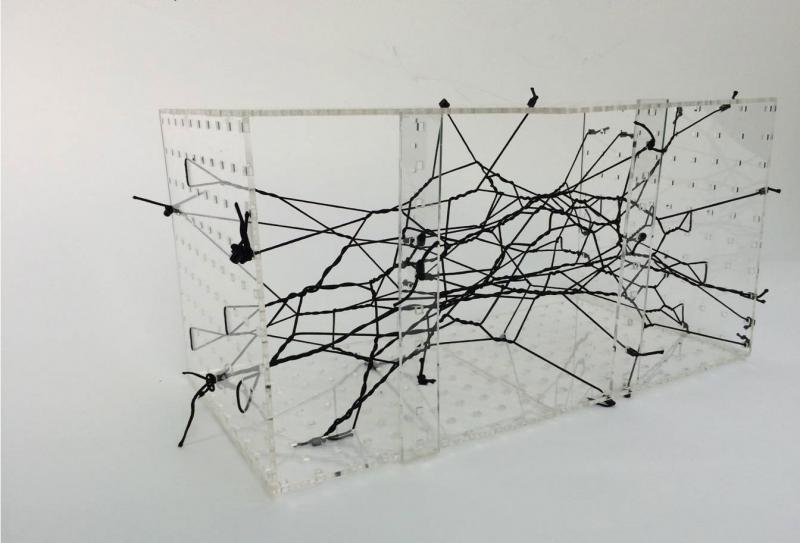
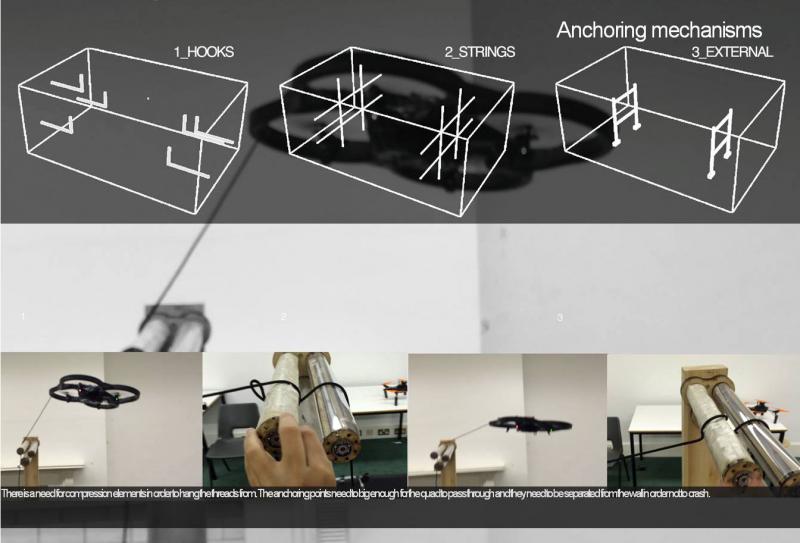
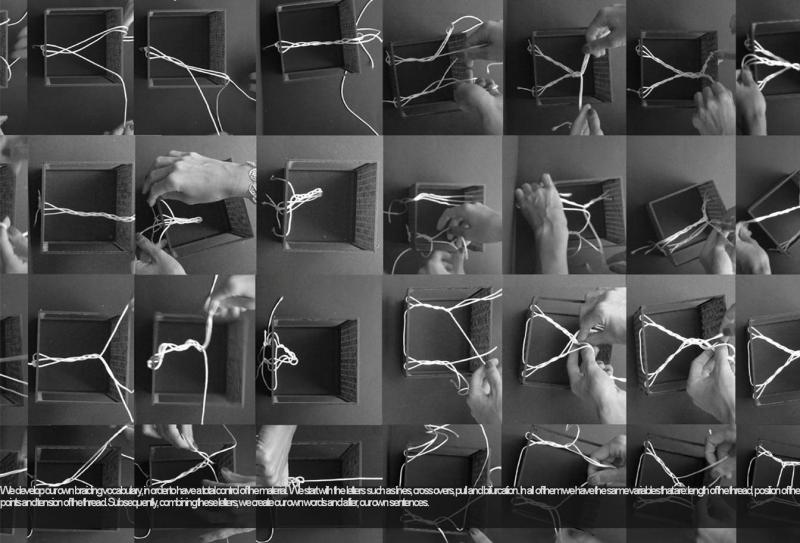
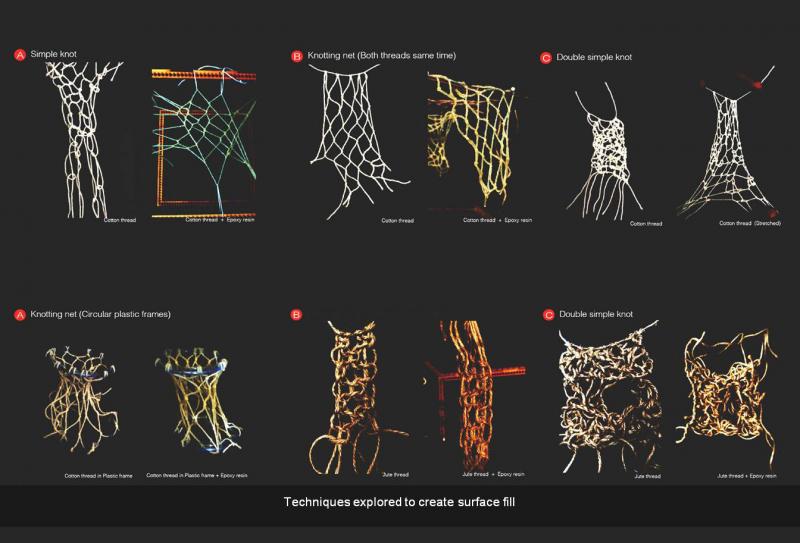
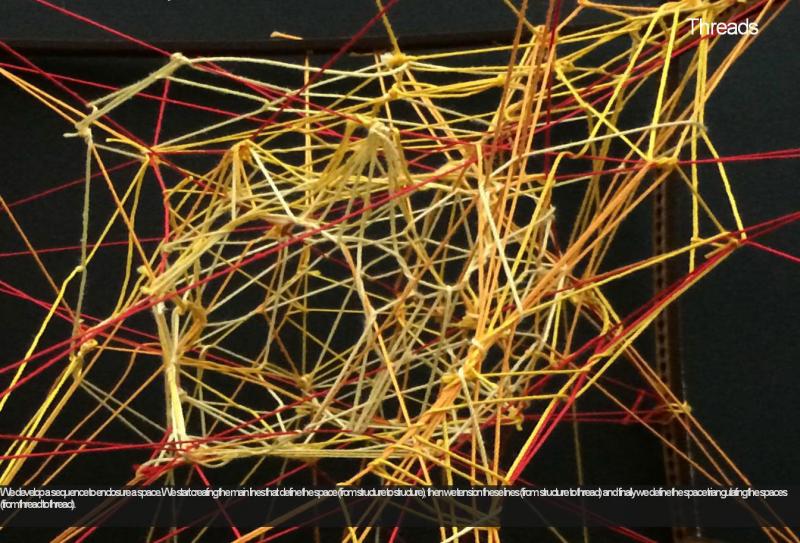
Our thesis employs quadcopters to work as a real-time design and construction swarm. This swarm performs in an autonomous and choreographed manner and adapts to external fluctuations from the environment and the user. As a construction system, it is fast, labour- free and unrestrained by distance. Our design research exploits the structural capability of tensile elements such as cables in order to span over large distances, both horizontally and vertically, while maintaining structural integrity. The Thread explores the possibility of combining structure and space within one complete system that connects two points over a distance.
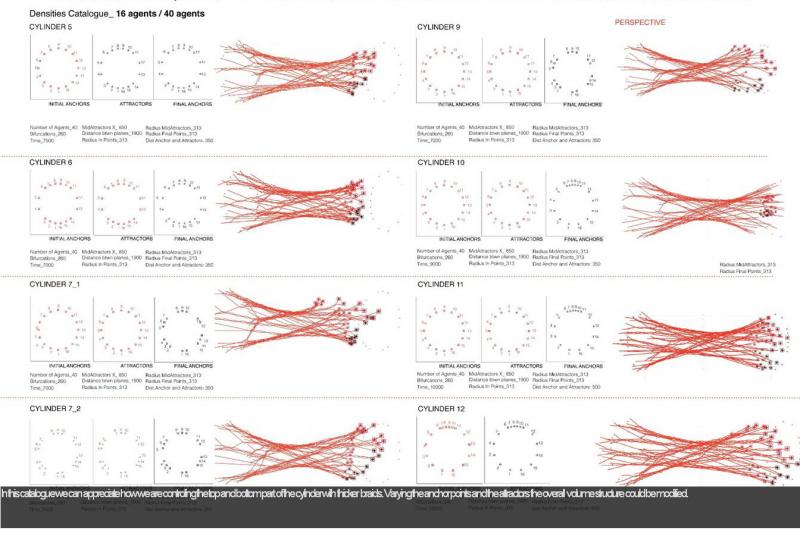
The use of quadcopters enables us to operate in between two extreme ends, establishing an initial tensile connection from point A to point B. This process is repeated while gradually reinforcing the structural stability of the system in tension and omitting the constraints of cantilevers in conventional construction. Using mobile agents and flexible material, the system is able to adapt to different structural and spatial requirements and enable rapidly deployed construction in remote areas. Thus, the proposed construction system would allow for behavioural emergence to be a design and structural driver.
The threading system is able to be reconfigured by mapping the flow of people through scanning. Structural stress data allows for spatial opportunities that could be added and incorporated within the system. Within this exchange of data, behavioural complexity emerges through the continuous feedback loop between the construction units, material, users and the designer.