ANTIBOT
Enter a description of the video here
// Spyropoulos Studio
Studio Master: Theodore Spyropoulos
Assistant: Mustafa El Sayed
// Students:
Leyla Asrar Haghighi (Iran), Dachuan Jing (China),
Baiye Ma (China), Yuchen Zhu (China)
// Project description:
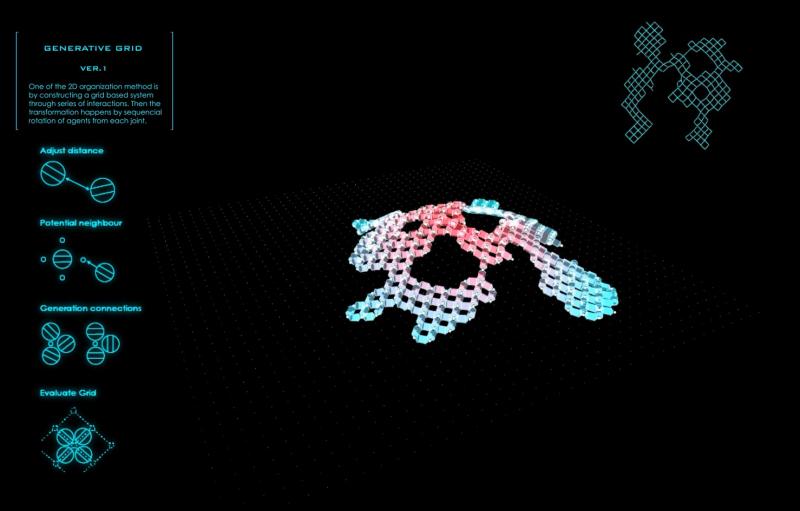
This project’s research takes the idea that architecture can be reconfigurable, have a flexible structure and capable of responding to change. This allows for the architecture to have spaces used in a multitude of ways and a smaller ecological footprint than more conventional architecture. Anti-Bot proposes a mobille, self-aware and autonomous porto-robotic architectural system at the scale of a building, as response to multiple precedent projects that were developed at the scale of the component.
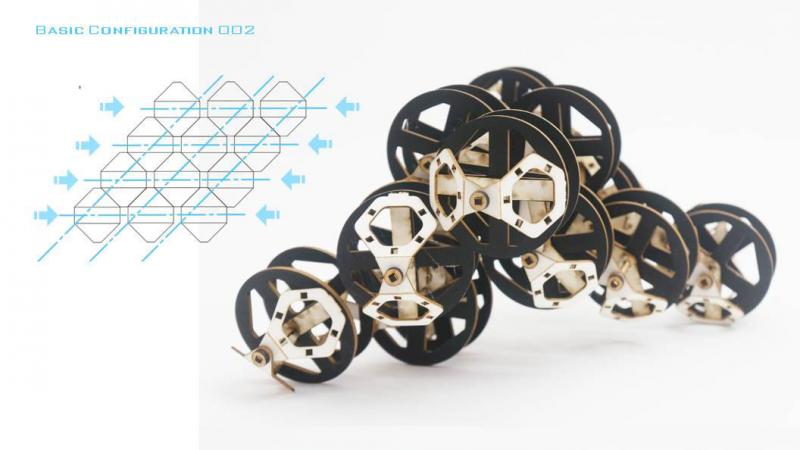
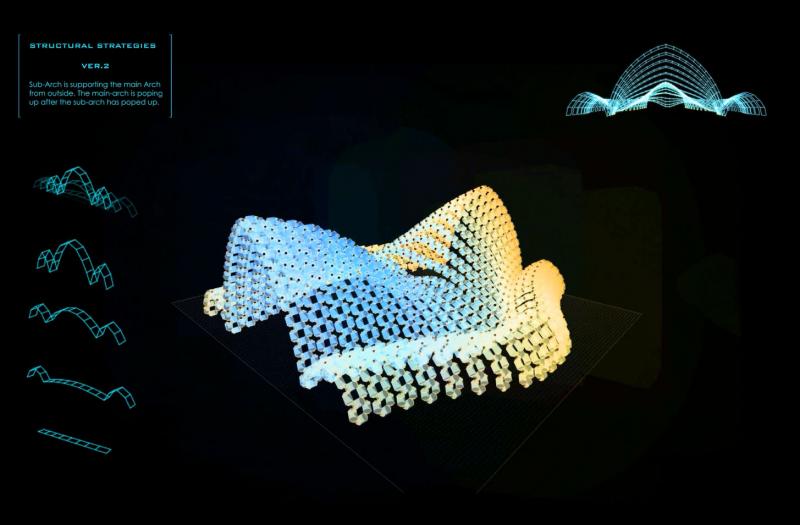
Structural morphologies were developed to address duration and population as the primary design drivers for assembly and self- structuring. Human agency, environmental interactions and functionality are secondary design drivers. The structure is capable of a continuous exchange of information and interaction in real time through a sensory system that is used to achieve adaptive reconfiguration, depending on the context. The form of our robots has been explored through understanding the degree of mobility necessary for the units and through geometric exploration. The units have been developed with the capability of decision making in 2D organisations and 3D self-structuring.
Computational platforms have been employed to develop a model of communication among our units. In terms of micro physical behaviour, magnetism has been used as the primary means of interaction between the units. On a more macro scale, an understanding of the social behaviour of insects and stigmergy has been an important part of organisation of our systems in site. Through understanding local behaviours and possibilities of global arrangement, we aim for the project to be able to respond to the requirements of the public, creating new patterns of use in the city.

Enter a description of the video here