NOMAD
Enter a description of the video here
// Theodore Spyropoulos Studio
Studio Master: Theodore Spyropoulos
Assistant: Mustafa El Sayed
// Students:
Dmytro Oleksandrovych Aranchii (Ukraine), Paul Clemens Bart (Germany), Yuqiu Iris Jiang (China), Flavia Ghirotto Santos (Brazil)
// Project description:
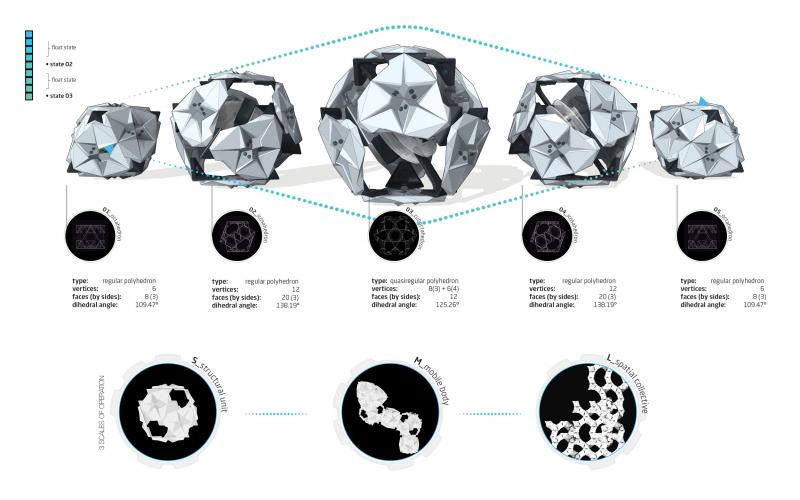
noMad proposes a behavioural assembly system that marks a shift in our understanding of the built environment from one which is finite to one which is autonomous, infinite and can provide real-time solutions that can adapt dynamically to the demands of its environment. The research utilises self-assembly as a fabrication approach for the negotiation of space. This occurs through the use of a sensory system that localises bottom-up decision making through self-aware unit-to-unit communication instead of a deterministic, superimposed building plan.
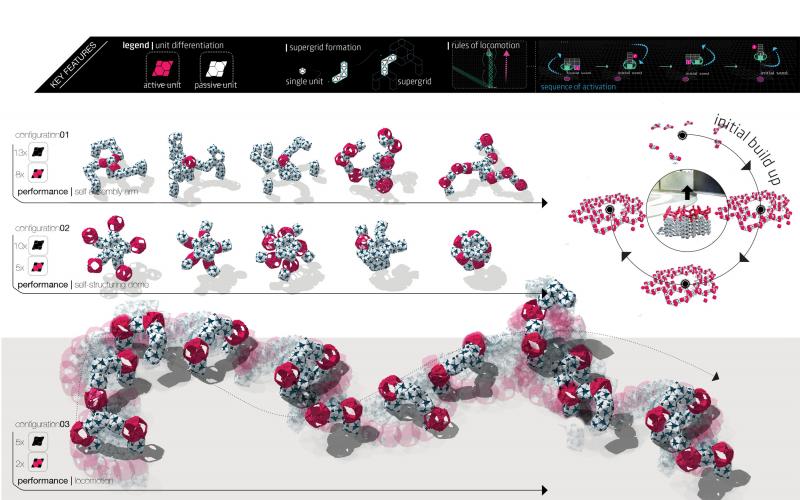
Anchored in the world of self-structuring polyhedra, noMad is based on principles of synergetics, the studying of morphing geometries and the impact of local changes on the behaviour of a global systems. The project operates on three distinct scales of intelligence and autonomy. This enables the units to self-assemble in order to move towards higher orders of organisation; from a highly mobile, nomadic state to the deployment of large scale spatial structures. At the smallest scale, the single unit can autonomously change shape, shifting its state by a simple rotational translation from one polyhedra to the other. This then shifts scales to a nomadic body plan; an ecology of machines showing creature-like characteristics and highly specific behaviour. In large populations, the units synchronise their transformation through reconfiguration in order to achieve flexibility of space.
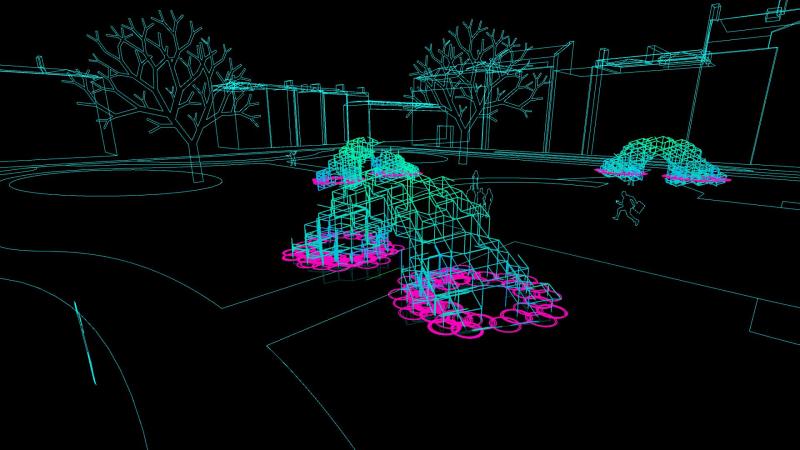
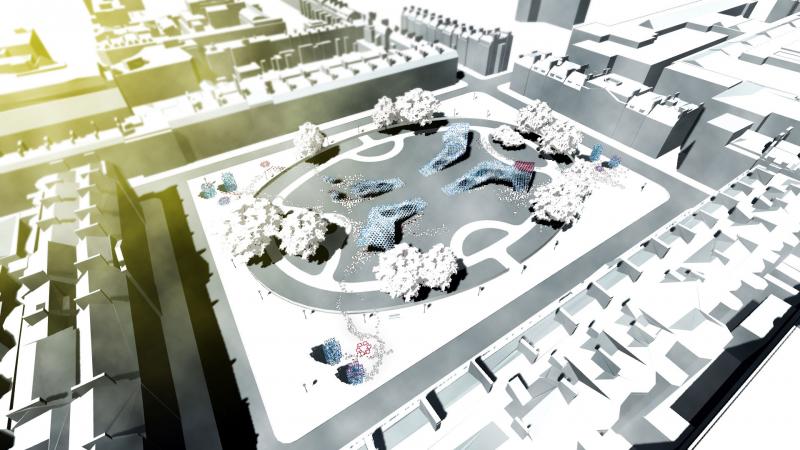
noMad operates in the city on the scale of the neighbourhood. By harvesting the digital layer of the city defined by real-time communication, data mining and environmental awareness, noMads life-cycle is never pre-determined. The research proposes a system that can self-regulate and adapt, react to outside influences and demands and encourages both interaction and communication.

Enter a description of the video here