OWO
Enter a description of the video here
// Theodore Spyropoulos Studio
Studio Master: Theodore Spyropoulos
Assistant: Mustafa El Sayed
// Students:
Agata Banaszek (Poland), Camilla Degli Esposti (Italy), Ilya Pereyaslavtsev (Russia), Antonios Thodis (Greece)
// Project description:
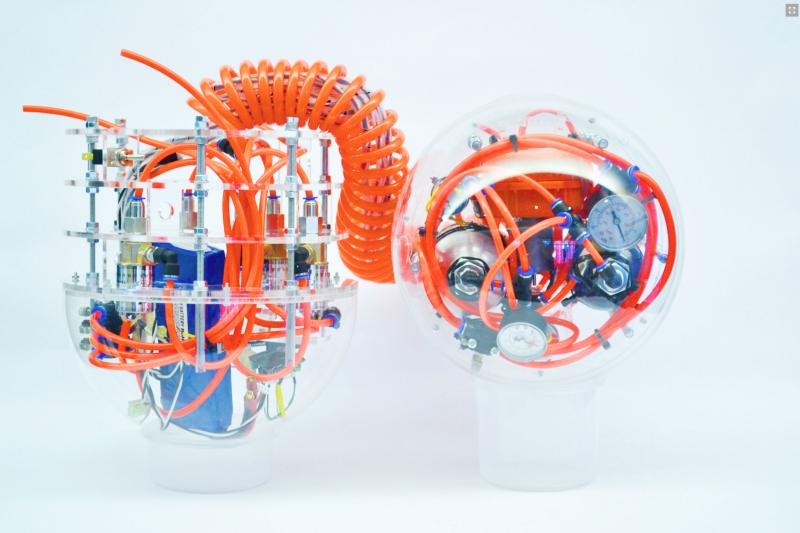
OwO is proposing a new model for the urban environment; a behavioural system based on simple rules and the complex relations and interactions between them in order to achieve a model of self-assembly, self- structuring, adaptation and reconfiguration in time. The proposal blurs the distinction between the artificial and the natural and opens up the possibilities of emergent space organisations that are based on singular and group behaviours.
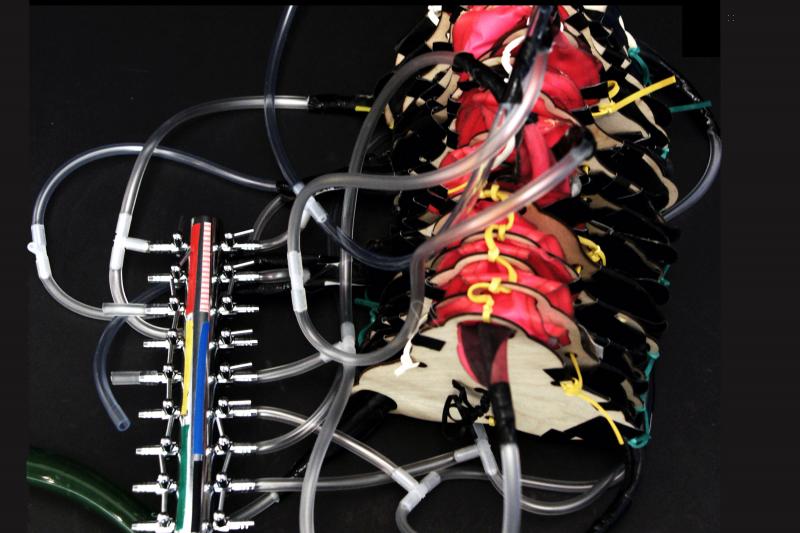
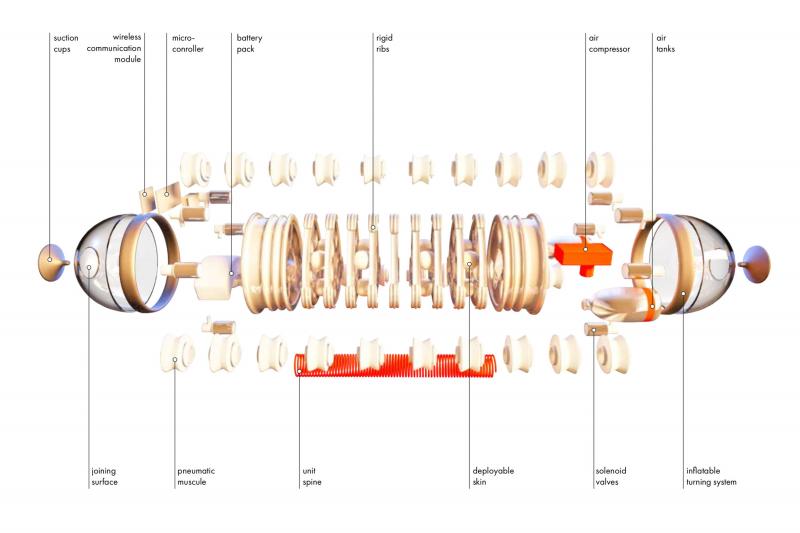
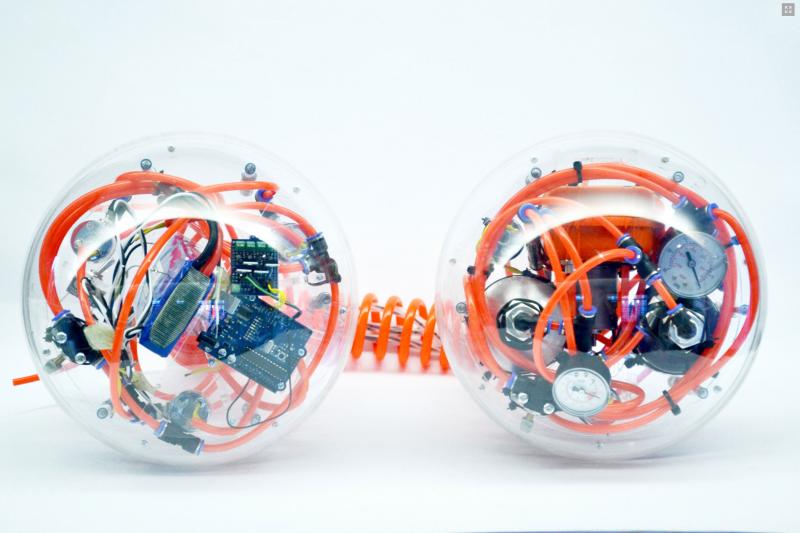
Digital simulations and physical prototyping tests are focused on communication strategies. The time-based system is initially set up with a basic unit that has the capacity to merge into different body plans through an open ended combinatorial procedure, with novel locomotion and self-structuring characteristics. The unit emphasises its internal mechanics, joint system, muscle activation, its autonomy and the unification of the whole system. On the global scale the organisations lead to a range of different spatial aggregations that are continuously reconfigurable.
London’s rich public space network is the the prototypical site of our project. The site enables us to take into consideration the evolution of spatial aggregations, the information-rich environment and the computational framework that characterise the contemporary city. The project integrates itself into a model for public space as a flexible and self-organised system that operates on different scales and conditions. It proposes a shift from a fixed and permanent public environment, towards an adaptable and participatory model for public space.

Enter a description of the video here